A comprehensive list of my work in robotics, software engineering, and IoT systems.
Integrated a 3-axis gantry robot with an omnidirectional mobile base for autonomous object grasping. Features YOLO segmentation, RealSense 3D depth extraction, and LiDAR-based auto-parking.
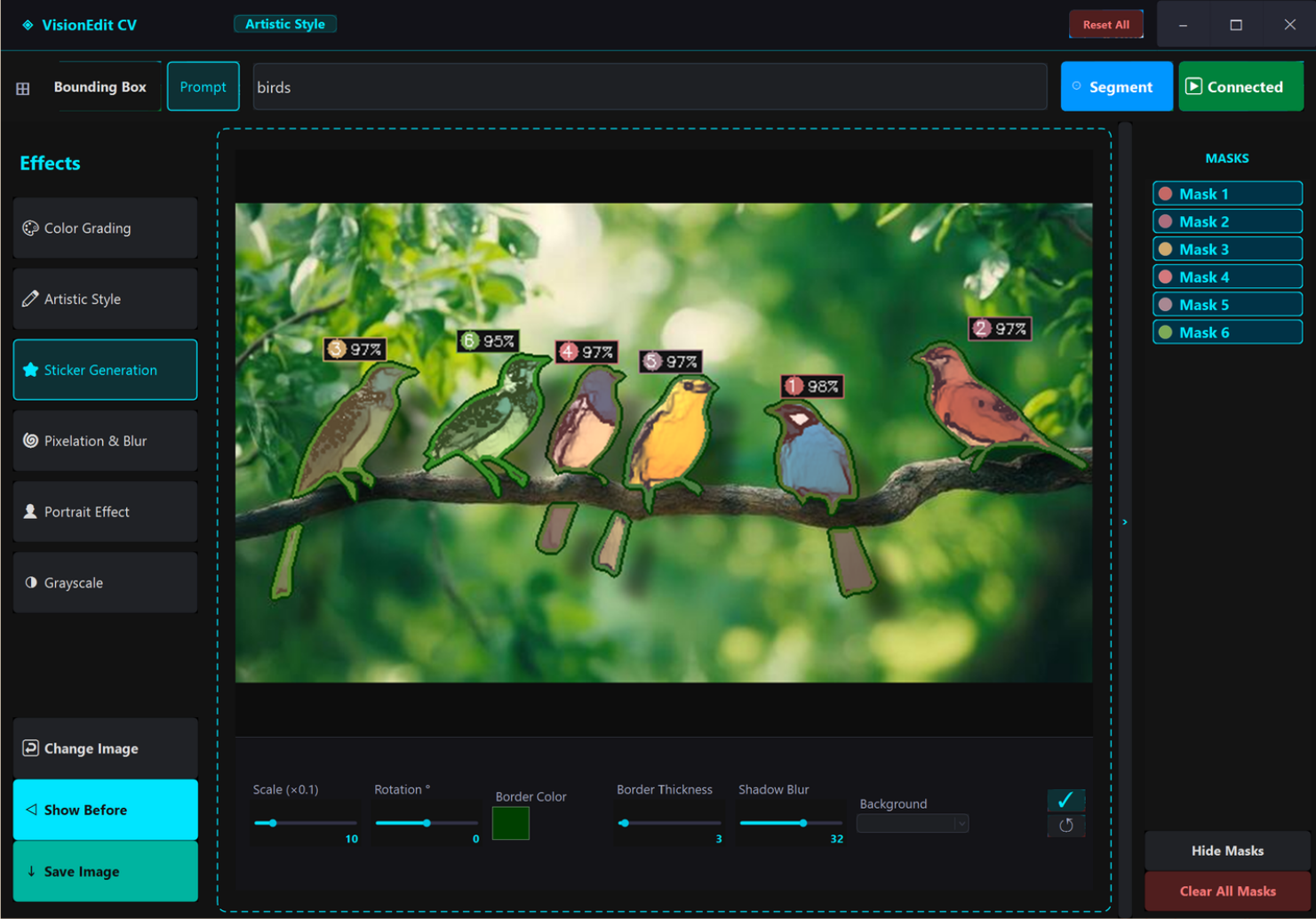
A high-performance image editing application utilizing Meta's Segment Anything Model 3 (SAM3) for precise object extraction. Built with a C# .NET frontend and a GPU-accelerated Python FastAPI backend.
Autonomous robot for leaf collection using ROS2 framework, Jetson Nano for navigation, and ESP32 for motor control. Implemented LiDAR-based SLAM for autonomous path following.
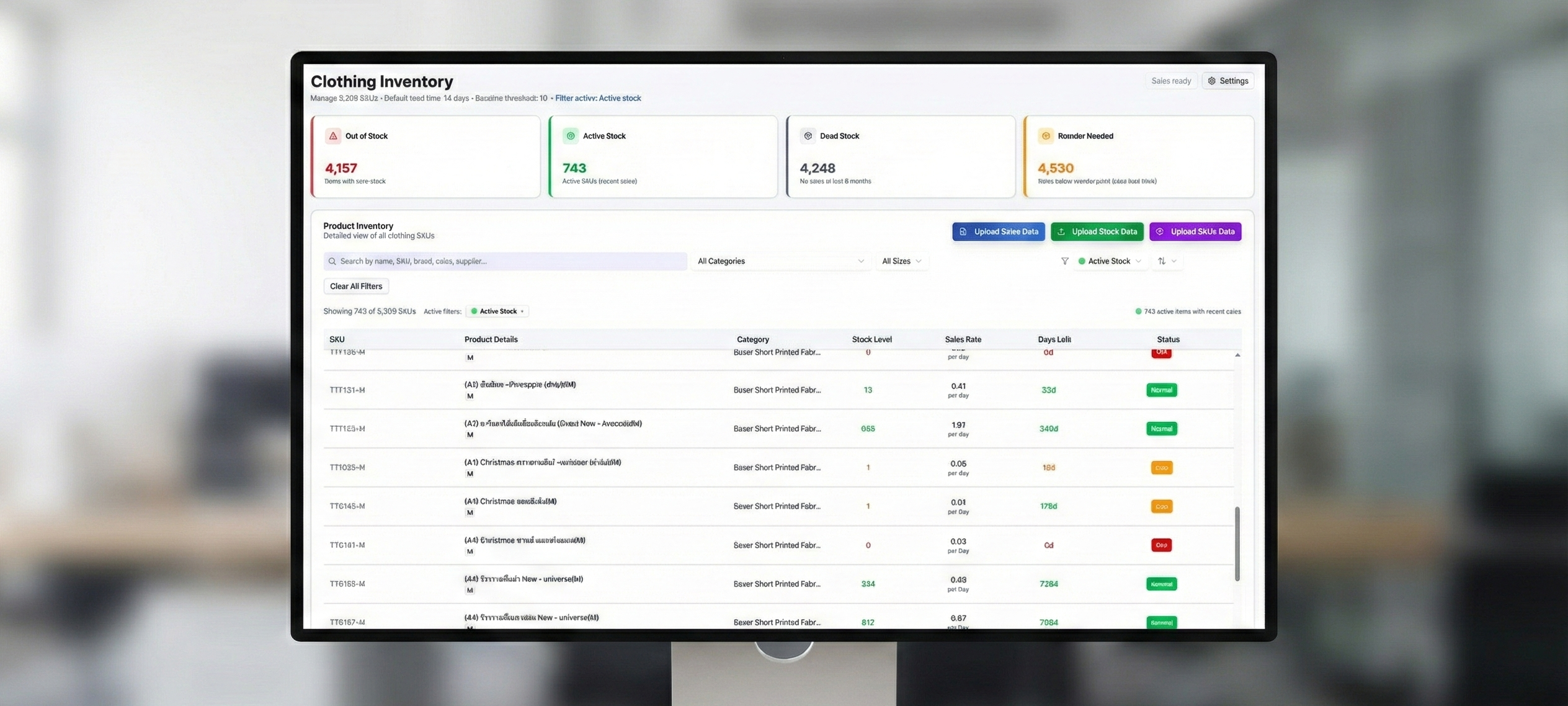
Full-stack IoT system with FastAPI backend, Next.js frontend, and Prophet forecasting for inventory optimization. Delivered as desktop app with analytics.
Solar-powered IoT system with multiple environmental sensors (PM2.5, CO2, temperature, humidity). Real-time wireless data transmission with receiver unit display.
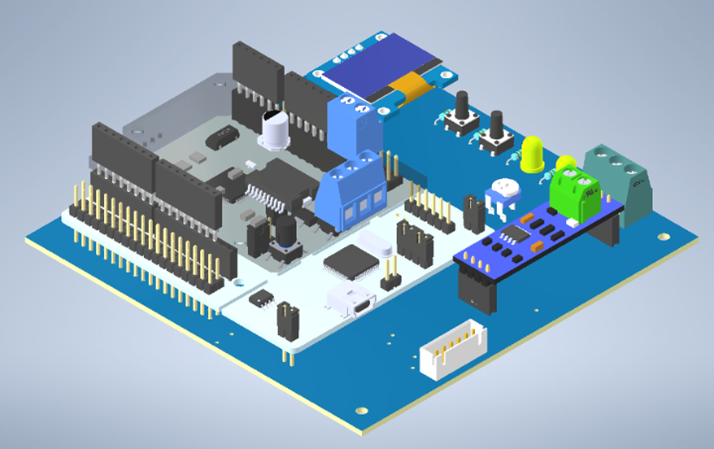
STM32-based BLDC motor controller using Field-Oriented Control with Modbus RS485 communication. Custom PCB design with closed-loop PID tuning.
Real-time hand-gesture recognition that drives an ESP32 Wi-Fi robot car. MediaPipe hand tracking, a lightweight TFLite classifier maps landmarks to 10 gestures, and TCP commands flow over a robot-hosted Wi-Fi access point.