
System Overview
Developed a sophisticated Brushless DC (BLDC) motor control system centered on an STM32 microcontroller, integrating the Modbus protocol over RS485 for real-time communication and control. This system implements both open-loop and closed-loop Field-Oriented Control (FOC), with the closed-loop implementation featuring precise PID tuning and relying on SPI-based encoder feedback managed via timer interrupts. The Modbus processing itself was executed using UART interrupt-driven logic. For user interaction and safety, the system featured an OLED screen to display the current motor speed and an emergency stop button. All components, including the custom control circuitry, were integrated onto a single, custom-designed and fabricated PCB.
Tech Stack
FOC Algorithm
Industry-standard Field-Oriented Control
Real-Time Control
High-frequency PWM and feedback control
Industrial Protocol
Modbus RS485 communication
Project Demo
Engineering Features
Developed a BLDC motor control system using the Modbus protocol over RS485, with an STM32 microcontroller handling real-time communication and speed control.
Implemented closed-loop Field-Oriented Control (FOC) with PID tuning, using timer interrupts, SPI-based encoder feedback, and UART interrupt-driven Modbus processing.
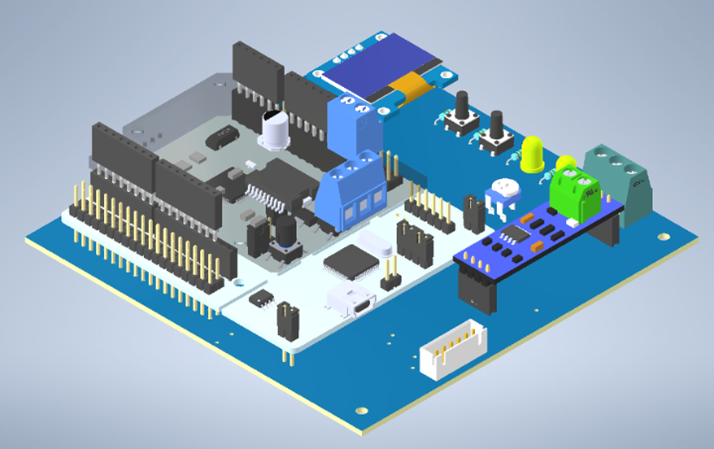
Designed and fabricated a custom PCB to house all the components into a single board.
CAD & Mechanical Models
Want to see more work?
I have more projects across robotics, embedded systems, and software engineering.
View All Projects